ENTRANDO AL MUNDO DE LA FÍSICA
Magnitud, Medición, Unidades fundamentales y derivadas de la física
- Magnitud: Es toda propiedad de los cuerpos que se puede medir. Por ejemplo: temperatura, velocidad, masa, peso, etc.
- Medir: Es comparar la magnitud con otra similar, llamada unidad, para averiguar cuántas veces la contiene.
- Unidad: Es una cantidad que se adopta como patrón para comparar con ella cantidades de la misma especie. Ejemplo: Cuando decimos que un objeto mide dos metros, estamos indicando que es dos veces mayor que la unidad tomada como patrón, en este caso el metro.
Las magnitudes fundamentales son aquellas magnitudes físicas elegidas por convención que permiten expresar cualquier magnitud física en términos de ellas. Gracias a su combinación, las magnitudes fundamentales dan origen a las magnitudes derivadas. Las siete magnitudes fundamentales utilizadas en física adoptadas para su uso en el Sistema Internacional de Unidades son la masa, la longitud, el tiempo, la temperatura, la intensidad luminosa, la cantidad de sustancia y la intensidad de corriente.
Una vez definidas las magnitudes que se consideran básicas, las demás resultan derivadas y se pueden expresar como combinación de las primeras.
Las unidades derivadas se usan para las siguientes magnitudes: superficie, volumen, velocidad, aceleración, densidad, frecuencia, periodo, fuerza, presión, trabajo, calor, energía, potencia, carga eléctrica, diferencia de potencial, potencial eléctrico, resistencia eléctrica, etcétera.
Algunas de las unidades usadas para esas magnitudes derivadas son:
- Fuerza: newton (N) que es igual a kg·m/s²
- Energía: julio (J) que es igual a kg·m²/s²
Adicción de Vectores por Descomposición Vectorial
Cuando vamos a sumar vectores, podemos optar por descomponerlos en sus componentes rectangulares y luego realizar la suma vectorial de estas. El vector resultante se logrará componiéndolo a partir de las resultantes en las direcciones x e y.
Un vector puede descomponerse en una suma de dos vectores que forman entre si un ángulo de 900. Esta operación se denomina descomposición rectangular del vector, para determinar las componentes del vector se utilizan el método gráfico y el analítico.


Suma de Vectores por el Método del Paralelogramo y El Polígono
Éste es el método gráfico más utilizado para realizar operaciones con vectores, debido a que se pueden sumar o restar dos o más vectores a la vez.
El método consiste en colocar en secuencia los vectores manteniendo su magnitud, a escala, dirección y sentido; es decir, se coloca un vector a partir de la punta flecha del anterior. El vector resultante esta dado por el segmento de recta que une el origen o la cola del primer vector y la punta flecha del último vector.
Cuando vamos a sumar más de dos vectores, podemos sumar dos de ellos por el método del triángulo. Luego el vector resultante sumarlo con otro vector también por el método del triángulo, y así sucesivamente hasta llegar a obtener la resultante final.
Otra forma de hacer la suma, es utilizando el llamado método del polígono. Este método es simplemente la extensión del método del triángulo. es decir, se van desplazando los vectores para colocarlos la “cabeza” del uno con la “cola” del otro (un “trencito”) y la resultante final es el vector que cierra el polígono desde la “cola” que quedo libre hasta la “cabeza” que quedo también libre (cerrar con un “choque de cabezas”). Nuevamente el orden en que se realice la suma no interesa, pues aunque el polígono resultante tiene forma diferente en cada caso, la resultante final conserva su magnitud, su dirección y su sentido.
Este método sólo es eficiente desde punto de vista gráfico, y no como un método analítico. En la figura 1se ilustra la suma de cuatro vectores.

Cantidades Vectoriales y Escalares
Una cantidad escalar se especifica totalmente por su magnitud, que consta de un número y una unidad.
Las operaciones entre cantidades escalares deben ser dimensional mente coherentes; es decir, las cantidades deben tener las mismas unidades para poder operarse.
Una cantidad vectorial se especifica totalmente por una magnitud y una dirección. Consiste en un número, una unidad y una dirección.
Las cantidades vectoriales son representadas por medio de vectores.
Por ejemplo, "una velocidad de 30 km/h" queda totalmente descrita si se define su dirección y sentido: "una velocidad de 30 km/h hacia el norte" a partir de un marco de referencia determinado (los puntos cardinales).
Entre algunas cantidades vectoriales comunes en física son: la velocidad, aceleración, desplazamiento, fuerza, cantidad de movimiento entre otras.

Sistema de Unidades, Conversión de Unidades
Una unidad de medida es una cantidad estandarizada de una determinada magnitud física, definida y adoptada por convención o por ley. Cualquier valor de una cantidad física puede expresarse como un múltiplo de la unidad de medida.
Una unidad de medida toma su valor a partir de un patrón o de una composición de otras unidades definidas previamente. Las primeras unidades se conocen como unidades básicas o de base (fundamentales), mientras que las segundas se llaman unidades derivadas.
Un conjunto de unidades de medida en el que ninguna magnitud tenga más de una unidad asociada es denominado sistema de unidades.
Todas las unidades denotan cantidades escalares. En el caso de las magnitudes vectoriales, se interpreta que cada uno de los componentes está expresado en la unidad indicada.
La conversión de unidades es la transformación de una cantidad, expresada en un cierta unidad de medida, en otra equivalente, que puede ser del mismo sistema de unidades o no.
Este proceso suele realizarse con el uso de los factores de conversión y las tablas de conversión.
Frecuentemente basta multiplicar por una fracción (factor de conversión) y el resultado es otra medida equivalente, en la que han cambiado las unidades. Cuando el cambio de unidades implica la transformación de varias unidades se pueden utilizar varios factores de conversión uno tras otro, de forma que el resultado final será la medida equivalente en las unidades que buscamos, por ejemplo si queremos pasar 8 metros a yardas, lo único que tenemos que hacer es multiplicar 8 x (0.914)=7.312 yardas.
Alguna equivalencia
1 m = 100 cm
1 m = 1000 mm
1 cm = 10 mm
1 km = 1000 m
1 m = 3.28 pies
1 m = 0.914 yardas
1 pie = 30.48 cm
1 pie = 12 pulgadas
1 pulgada = 2.54 cm
1 milla = 1.609 km
1 libra = 454 gramos
1 kg = 2.2 libras
1 litro = 1000 Cm3
1 hora = 60 minutos
1 hora = 3600 segundos

Notación Exponencial
La notación científica, también denominada patrón o notación en forma exponencial, es una forma de escribir los números que acomoda valores demasiado grandes (100000000000) o pequeños (0.00000000001)1 para ser convenientemente escrito de manera convencional. El uso de esta notación se basa en potencias de 104 (los casos ejemplificados anteriormente en notación científica, quedarían 1 × 1011 y 1 × 10−11, respectivamente). El módulo del exponente es la cantidad de ceros que lleva el número delante, en caso de ser negativo (nótese que el cero delante de la coma también cuenta), o detrás, en caso de tratarse de un exponente positivo. Como ejemplo, en la química, al referirse a la cantidad de entidades elementales (átomos, moléculas, iones, etc.), hay una cantidad llamada cantidad de materia (mol).
El número m se denomina «mantisa» y e el «orden de magnitud».6 La mantisa, en módulo, debe ser mayor que o igual a 1 y menor que 10, y el orden de magnitud, dada como exponente, es el número que más varía conforme al valor absoluto.7
Observe los ejemplos de números grandes y pequeños:
- 600 000
- 30 000 000
- 500 000 000 000 000
- 7 000 000 000 000 000 000 000 000 000 000 000
- 0.0004
- 0.00000001
- 0.0000000000000006
- 0.0000000000000000000000000000000000000000000000008
Notación exponencial es un método en matemáticas que permite la representación de números en una forma más corta y ayuda en los cálculos matemáticos. Por ejemplo, 1’000.000 (Un millón), puede ser escrito como 1 x 106. El número de Avogadro (símbolos: L, NA), el cual es el número de moléculas en 18 gramos de agua, es, 602,000,000,000,000,000,000,000 o 6.02 x 1023. Cuando se multiplican grandes números usando la notación exponencial, los exponentes son sumados. Por ejemplo, 1000 x 1000 = 1’000.000, o (1 x 103) x (1 x 103) = 1 x 106

Antecedentes de la física
El ser humano, desde el principio de los tiempos, ha tenido la curiosidad y el hábito de querer aprender la explicación al porqué de los sucesos y fenómenos que acontecían alrededor suyo. Los cambios del clima, los astros celestes y su movimiento cíclico, el aire, la tierra, el fuego.
Nace de esta forma la filosofía que sería el antecedente de la física actual. De forma puramente experimental se comienzan a considerar las leyes que rodean al hombre. De esta forma, podemos ver en un antiguo texto de Ptolomeo llamado “Almagesto”, donde el autor afirma que la Tierra es el centro del universo y que los astros giran alrededor de ella. Esta afirmación fue considerada como una ley real durante muchos siglos después.
Destacó por alla en el siglo XVI uno de los pioneros de la física y claramente el antecedente de la física moderna. Su nombre Galileo Galilei. A él le debemos grandes estudios sobre el movimiento de los astros, y ya por entonces comenzó a utilizar los primeros telescopios que se inventaban en el mundo. Tantos siglos atrás, Galileo observó por primera vez los satélites que giran entorno a Júpiter. Lo que demostraba, según el modelo heliocéntrico de Copernico que no todos los astros giraban alrededor de la tierra, lo que dejaba de forma más probable a la tierra como el elemento que giraba entorno al sol.
Otro impulsor de la física y antecedente de la física moderna fue sin duda Isaac Newton, cuya obra “philosophiae naturalis” de 1687 marcó un hito en la historia de la física describiendo las leyes de la dinámica más conocidas hoy en día como las “leyes de Newton”.
Nace de esta forma la filosofía que sería el antecedente de la física actual. De forma puramente experimental se comienzan a considerar las leyes que rodean al hombre. De esta forma, podemos ver en un antiguo texto de Ptolomeo llamado “Almagesto”, donde el autor afirma que la Tierra es el centro del universo y que los astros giran alrededor de ella. Esta afirmación fue considerada como una ley real durante muchos siglos después.
Destacó por alla en el siglo XVI uno de los pioneros de la física y claramente el antecedente de la física moderna. Su nombre Galileo Galilei. A él le debemos grandes estudios sobre el movimiento de los astros, y ya por entonces comenzó a utilizar los primeros telescopios que se inventaban en el mundo. Tantos siglos atrás, Galileo observó por primera vez los satélites que giran entorno a Júpiter. Lo que demostraba, según el modelo heliocéntrico de Copernico que no todos los astros giraban alrededor de la tierra, lo que dejaba de forma más probable a la tierra como el elemento que giraba entorno al sol.
Otro impulsor de la física y antecedente de la física moderna fue sin duda Isaac Newton, cuya obra “philosophiae naturalis” de 1687 marcó un hito en la historia de la física describiendo las leyes de la dinámica más conocidas hoy en día como las “leyes de Newton”.

La importancia de la física en el mundo moderno
La es la segunda, luego de la matemática, en lo relativo a la pureza de sus principios. Esta disciplina describe el funcionamiento del mundo a través de fórmulas de matemática aplicada. Estudia las fuerzas fundamentales del universo y cómo interactúan con la materia, observando , desde galaxias y planetas hasta átomos y quarks, y todo aquello que se encuentra en el medio. La química es esencialmente física aplicada y la biología es esencialmente química aplicada. La teoría de la física es responsable de los grandes descubrimientos en el campo de la electrónica que generaron los avances en las modernas y los medios electrónicos.
SEGUNDO PARCIAL
M.R.U.
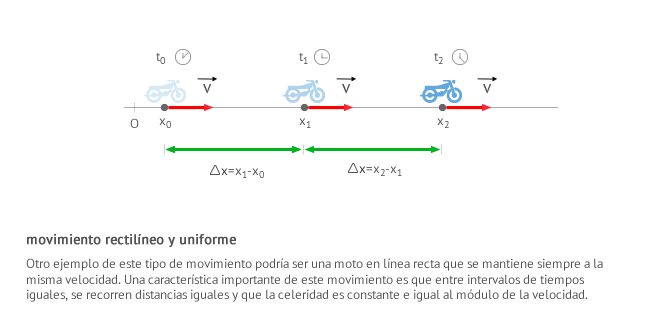
El movimiento rectilíneo uniforme (m.r.u.), es aquel con velocidad constante y cuya trayectoria es una línea recta. Un ejemplo claro son las puertas correderas de un ascensor, generalmente se abren y cierran en línea recta y siempre a la misma velocidad.
Observa que cuando afirmamos que la velocidad es constante estamos afirmando que no cambia ni su valor (también conodido como módulo, rapidez o celeridad) ni la dirección del movimiento.
Un movimiento rectilíneo uniforme (m.r.u.) es aquel que tiene su velocidad constante y su trayectoria es una línea recta. Esto implica que:
- El espacio recorrido es igual que el desplazamiento.
- En tiempos iguales se recorren distancias iguales.
- La rapidez o celeridad es siempre constante y coincide con el módulo de la velocidad.
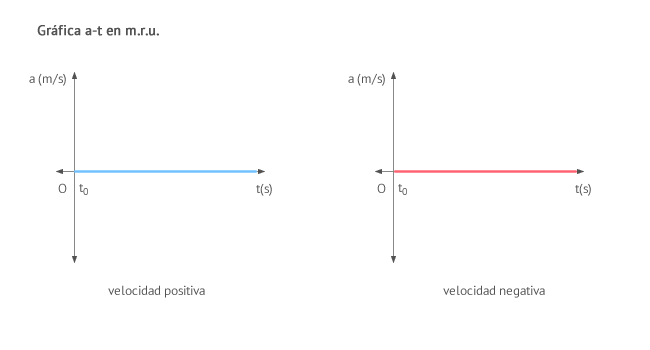
Ecuaciones y Gráficas del M.R.U.
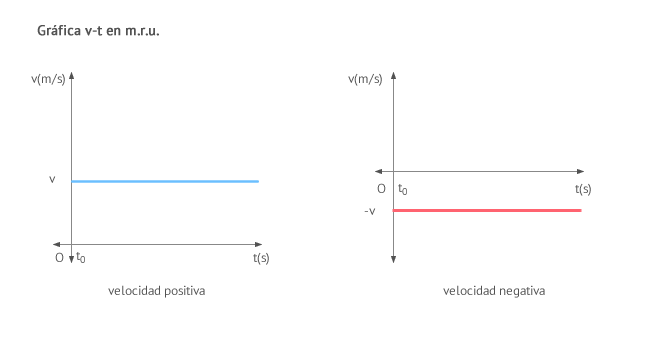
Velocidad
En los m.r.u. la velocidad del cuerpo es constante y por tanto igual a la velocidad inicial. Su unidad en el Sistema Internacional (S.I.) es el metro por segundo (m/s).
donde:
- v es la velocidad.
- v0 es la velocidad inicial.
Posición
Su unidad en el Sistema Internacional (S.I.) es el metro (m) y se obtiene por medio de la siguiente expresión:
donde:
- x0 es la posición inicial.
- v es la velocidad que tiene el cuerpo a lo largo del movimiento.
- t es el intervalo de tiempo durante el cual se mueve el cuerpo.
Observa lo que t representa en la ecuación de posición: El intervalo de tiempo durante el cual se mueve el cuerpo. Dicho intervalo a veces es representado por t y otras por ∆t. En cualquiera de los casos, t=∆t = tf - ti siendo tf y ti los instantes de tiempo inicial y final respectivamente del movimiento que estamos estudiando.
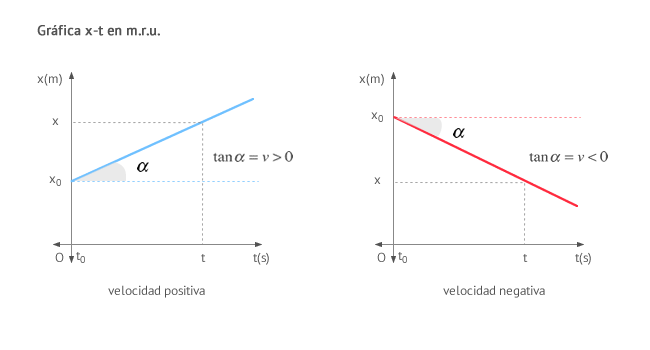
La inclinación de la recta de la gráfica depende de la velocidad. A mayor pendiente, mayor velocidad. Por otro lado, recuerda puedes deducir esta de la gráfica de la fila superior teniendo en cuenta que la distancia recorrida coincide con el área encerrada entre el eje x y la linea que representa la velocidad en el intervalo de tiempo considerado (que en nuestro caso hemos llamado t). ¿Sabrías hacerlo?
Aceleración
Su unidad en el Sistema Internacional (S.I.) es el metro por segundo al cuadrado (m/s2). Su valor a lo largo del movimiento siempre es cero.
En aquellos casos en los que la posición inicial es cero ( x0 = 0 ), la distancia recorrida y la posición coinciden, y su valor es:
s=v⋅t
Por último, cuando tengas que usar las ecuaciones anteriores recuerda el siguiente convenio de signos:
- La posición del cuerpo se considera de igual signo que el semieje (semieje positivo o semieje negativo) en el que se encuentre.
- La velocidad se considera de igual signo que el sentido del eje (sentido positivo o sentido negativo) en el que se desplace.
Movimiento Rectilíneo Uniforme: Cómo resolver problemas paso a paso
Como su propio nombre indica, hablamos de movimiento rectilíneo uniforme cuando un cuerpo, ya sea un vehículo, un objeto, un animal, lo que sea, se mueve en línea recta a una velocidad constante:
- Movimiento: Un cuerpo se mueve
- Rectilíneo: En línea recta
- Uniforme: A una velocidad constante
Es importante tener esto presente, ya que si alguna de estas premisas no se cumple, las fórmulas del movimiento rectilíneo uniforme ya no serían válidas.
Fórmulas del Movimiento Rectilíneo Uniforme
En el movimiento rectilíneo uniforme intervienen estas tres variables:
- Posición: Posición desde donde empieza a moverse (posición inicial) y la posición donde llega después de un tiempo (posición final)
- Velocidad: La velocidad siempre será constante. Si que influye su dirección
- Tiempo: Instante en el que empieza a moverse el cuerpo (tiempo inicial) o el tiempo que tarda en recorrer una determinada distancia (tiempo final)
Estas tres variables están relacionadas mediante esta fórmula:

Donde:
- X = Posición final (metros en el sistema internacional)
- Xo = Posición inicial (metros, en el sistema internacional)
- v = Velocidad (metros/segundo, en el sistema internacional)
- to = Tiempo inicial (segundos, en el sistema internacional)
- t = Tiempo final (segundos, en el sistema internacional)
Cambio de Unidades
Hay que trabajar siempre en las mismas unidades. No estamos obligados a trabajar con las unidades del sistema internacional, pero lo hacemos para establecer un criterio.
Si el enunciado te da el tiempo en horas y la distancia en kilómetros, hay que tener en cuenta que la posición final estará en kilómetros y la velocidad en km/h.
También tienes que tener mucho cuidado cuando se mezclan unidades en el enunciado, por ejemplo, que te den los datos en horas pero el resultado te lo pidan en segundos.
Debes dominar perfectamente el cambio de unidades. En el Curso de M.R.U. dedico una lección entera a explicar el cambio de unidades paso a paso para que lo entiendas perfectamente.
Lo que no puedes hacer, bajo ningún concepto, es mezclar unidades de tiempo y distancia. ¡Eso nunca!
Ejemplo de Ejercicios Resueltos de Movimiento Rectilíneo Uniforme
Vamos a resolver paso a paso uno de los ejemplos de los ejercicios más típicos de movimiento rectilíneo uniforme:
- Dos trenes parten desde dos ciudades, separadas 500 km en línea recta. El tren A tiene una velocidad de de 180 km/h. El tren B, sale 1 hora más tarde, en sentido contrario, con una velocidad de 200 km/h.
- a) ¿Cuánto tiempo tardarán en encontrarse?
- b) ¿Dónde se encontrarán?
- c) ¿Cuánta distancia recorre cada uno?
En primer lugar debes hacerte un esquema de los datos que te da el enunciado y tener muy claro lo que te están pidiendo. Olvídate de fórmulas por el momento.

Dibujamos dos puntos A y B separados 500 km, son sus correspondientes velocidades, cada una con su sentido y colocamos más o menos donde creemos que se encontrarán, el punto x.
Ahora hay que establecer las condiciones iniciales para cada tren, es decir, su posición inicial, su tiempo inicial y el sentido de la velocidad, desde nuestro sistema de referencia, y según los signos de los ejes de coordenadas:
Referencia de espacio:
Inicialmente, el punto A se encuentra en el punto 0 y el punto B que está a su derecha, estarán en el punto 500.
Si cogiéramos el punto B, como 0, el punto A sería -500,
Referencia de tiempo:
El tren B sale una hora más tarde, luego empezamos a contar cuando sale el tren A. Es decir, el tiempo inicial del tren A será 0 y por tanto para el tren B, el tiempo ya habrá avanzado 1 hora cuando parta:
Tren A –> to = 0 h
Tren B –> to = 1 h
Siempre se ponte to = 0 para el tren que salga antes, ya que es nuestra referencia de cuando el tiempo empieza a contar. Si el enunciado dijera que el tren B sale 2 horas antes, entonces:
Tren A –> to = 2 h
Tren B –> to = 0 h
Sentido velocidad:
El tren A va hacia la derecha, luego su signo es positivo, según los ejes de coordenadas.
Por el contrario, el tren B, al ir hacia la izquierda, el signo de la velocidad es negativo.
Indicamos todos los datos en nuestro esquema:

Ahora solo nos queda aplicar la fórmula para cada tren. Los únicos datos que desconocemos son la posición final, x, y el tiempo final t:
Para el tren A:
Para el tren B:
Como es un punto de encuentro, x es la misma en las dos ecuaciones, por lo que las igualamos para despejar t, que también será la misma:
Y despejamos t:
Si quieres saber cómo despejar la t, puede interesarte también el Curso de Ecuaciones de Primer Grado. Saber despejar una incógnita te va a ahorrar muchos quebraderos de cabeza, así como te ayudará también a saber en las unidades en las que tendrás el resultado.
Con este valor de t, lo sustituimos en cualquiera de las dos ecuaciones. Es más fácil en la primera:
Date cuenta que no he trabajado con las unidades del sistema internacional, ya que el enunciado me daba los datos en horas, en km y en km/h y no he tenido que hacer ningún cambio de unidad.
En el Curso de Movimiento Rectilíneo Uniforme, aprenderás a cambiar unidades de una forma fácil y dejará de ser un problema para ti.
Ahora podemos contestar a todas las preguntas:
a) Tardarán en encontrarse 1,84 horas
b) Se encontrarán en el punto 331,2 km
c) Si te das cuenta en el esquema, el tren A recorre x km y por tanto, el tren B recorre 500-x. Recuerda que x es una posición, es decir, un punto. El espacio recorrido es igual a la posición final, menos la posición inicial:
Espacio recorrido= Posición final – Posición inicial
Para ir del punto A al punto X, el tren A recorre 331,2 km:
Espacio recorrido=331,2-0=331,2 km
Para ir del punto B al punto X, el tren A recorre 168,8 km:
Espacio recorrido=500-331,2=168,8 km
M.R.U.A.
El movimiento rectilíneo uniformemente acelerado (m.r.u.a.), también conocido como movimiento rectilíneo uniformemente variado (m.r.u.v), es un movimiento rectilíneo con aceleración constante, y distinta de cero. En este apartado vamos a estudiar:
- El concepto y las propiedades del m.r.u.a.
- Las ecuaciones del m.r.u.a.
- Cómo deducirlas
- El teorema de Merton
Concepto de m.r.u.a.
Encontrar el movimiento rectilíneo uniformemente acelerado (m.r.u.a.) en tu día a día es bastante común. Un objeto que dejas caer y no encuentra ningún obstáculo en su camino (caída libre) ó un esquiador que desciende una cuesta justo antes de llegar a la zona de salto, son buenos ejemplos de ello. El movimiento rectilíneo uniformemente acelerado (m.r.u.a.) es también conocido como movimiento rectilíneo uniformemente variado (m.r.u.v) y cumple las siguientes propiedades:
- La trayectoria es una línea recta y por tanto, la aceleración normal es cero
- La velocidad instantánea cambia su módulo de manera uniforme: aumenta o disminuye en la misma cantidad por cada unidad de tiempo. Esto implica el siguiente punto
- La aceleración tangencial es constante. Por ello la aceleración media coincide con la aceleración instantánea para cualquier periodo estudiado
Un cuerpo realiza un movimiento rectilíneo uniformemente acelerado (m.r.u.a.) o movimiento rectilíneo uniformemente variado (m.r.u.v.) cuando su trayectoria es una línea recta y su aceleración es constante y distinta de 0. Esto implica que la velocidad aumenta o disminuye su módulo de manera uniforme.

Observa que, aunque coloquialmente hacemos distinción entre un cuerpo que acelera y otro que frena, desde el punto de vista de la Física, ambos son movimientos rectilíneos uniformemente variados. La única diferencia es que mientras que uno tiene una aceleración positiva, el otro la tiene negativa.
Ecuaciones de M.R.U.A.
Las ecuaciones del movimiento rectilíneo uniformemente acelerado (m.r.u.a.) o movimiento rectilíneo uniformemente variado (m.r.u.v.) son:
Donde:
Donde:
- x, x0: La posición del cuerpo en un instante dado (x) y en el instante inicial (x0). Su unidad en el Sistema Internacional (S.I.) es el metro (m)
- v,v0: La velocidad del cuerpo en un instante dado (v) y en el instante inicial (v0). Su unidad en el Sistema Internacional es el metro por segundo (m/s)
- a: La aceleración del cuerpo. Permanece constante y con un valor distinto de 0. Su unidad en el Sistema Internacional es el metro por segundo al cuadrado (m/s2)
- t: El intervalo de tiempo estudiado. Su unidad en el Sistema Internacional es el segundo (s)
Aunque las anteriores son las ecuaciones principales del m.r.u.a. y las únicas necesarias para resolver los ejercicios, en ocasiones resulta útil contar con la siguiente expresión:
La fórmula anterior permite relacionar la velocidad y el espacio recorrido conocida la aceleración y puede ser deducida de las anteriores, tal y como puede verse a continuación.
Deducción ecuaciones m.r.u.a.
Para deducir las ecuaciones del movimiento rectilíneo uniformemente acelerado (m.r.u.a.) o movimiento rectilíneo uniformemente variado (m.r.u.v.) hay que tener en cuenta que:
- La aceleración normal vale cero:
an=0 - La aceleración media, la aceleración instantánea y la aceleración tangencial tienen el mismo valor:
a=am=at=cte
Con esas restricciones nos queda:
Esta primera ecuación relaciona la velocidad del cuerpo con su aceleración en cualquier instante de tiempo y se trata de una recta (v) cuya pendiente coincide con la aceleración y cuya coordenada y en el origen es la velocidad inicial (v0). Nos faltaría por obtener una ecuación que nos permita obtener la posición. Para deducirla hay distintos métodos. Nosotros usaremos el teorema de la velocidad media o teorema de Merton:
"Un cuerpo en movimiento uniformemente acelerado recorre, en un determinado intervalo de tiempo, el mismo espacio que sería recorrido por un cuerpo que se desplazara con velocidad constante e igual a la velocidad media del primero"
Esto implica que:
El valor de la velocidad media, en el caso de que la aceleración sea constante, se puede observar claramente en la siguiente figura:
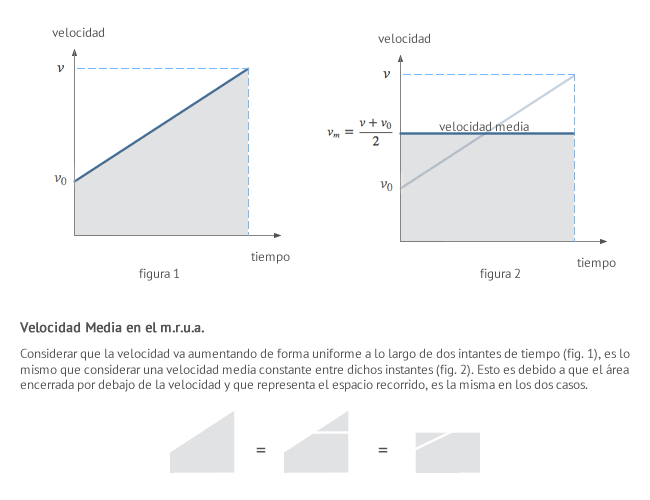
Si desarrollamos las ecuaciones vistas x=
Donde hemos aplicado:
vm=v+v02 v=v0+a⋅t
Por último, indicarte que en las ecuaciones anteriores se ha considerado que el movimiento se realiza en el eje x. Si nos moviéramos en el eje y, por ejemplo en los movimientos de caída libre o de lanzamiento vertical, simplemente sustituirías la x por la y en la ecuación de posición, quedando:
Tiro vertical y caída libre
Estos movimientos se resuelven con las mismas ecuaciones de MRUV, tomando como aceleración la de la gravedad de la tierra, que en vez de "a" la llamamos "g". La aceleración de la tierra también es una magnitud vectorial y su módulo es:
Su signo depende de cómo ubiquemos el sistema de referencia. Si el sistema lo ponemos creciente desde la tierra hacia arriba entonces g tiene signo negativo.
Debido a que trabajamos con sistemas coordenados, utilizamos la misma fórmula para el tiro vertical que para la caída libre (que además son las mismas formulas que utilizamos para todo MRUV). Tomamos positiva a la aceleración cuando hace aumentar a la velocidad en el sentido que crece el sistema de referencia y negativa en el otro caso.
Tiro Vertical
El tiro vertical corresponde al movimiento en el cual se lanza un objeto en línea recta hacia arriba con una velocidad inicial.
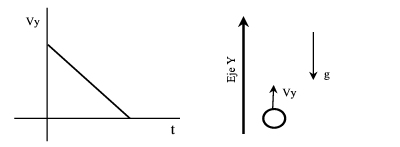
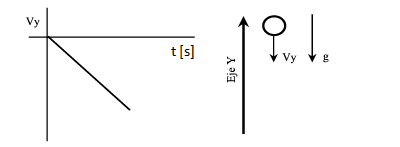
Caída Libre
La caída libre corresponde al movimiento en dónde se deja caer un objeto. El siguiente gráfico corresponde a la velocidad durante la caída libre, poniendo un sistema de coordenadas con el origen en el piso y dirigido hacia arriba, es decir la velocidad tiene signo negativo.
Con esta disposición, la aceleración también tiene signo negativo. En el gráfico consideramos velocidad inicial nula. Si realizamos un ejercicio completo de tiro vertical y caída libre, hay que tener en cuenta que en el tiro vertical sí tenemos velocidad inicial, pero la caída libre es otro movimiento que comienza justamente cuando esa velocidad es cero.
Características del tiro vertical y la caída libre
En ambos casos se toman en cuenta las velocidades iniciales y las distancias, pero no intervienen el peso o la masa para calcular la altura o el tiempo.
Debería importar la forma de los objetos con el fin de calcular el rozamiento con el aire (que ejerce una fuerza), pero no lo consideramos en estos ejercicios.
Para el tiro vertical, en el caso de que utilicemos un sistema de referencia dirigido hacia arriba, la aceleración tiene signo negativo y velocidad inicial positiva. En la caída libre, con el mismo sistema de referencia, la velocidad es negativa (en aumento) y la aceleración no cambia de signo (con ese sistema seguiría siendo negativa).
FORMULAS CAÍDA LIBRE

FORMULAS TIRO VERTICAL
En el articulo caída libre y tiro vertical comentamos que el signo menos es por que en un cuerpo que es arrojado hacia arriba la aceleración hace un efecto de frenado de manera que su aporte en la velocidad del cuerpo es negativa.

Las siguientes ecuaciones son un caso particular, cuando el objeto alcanza la altura máxima, es decir que su velocidad final es cero, en ese instante el cuerpo comienza su descenso a la tierra.
Como se puede ver, el tiempo en alcanzar la altura máxima depende solo de la velocidad con que se arroje el cuerpo hacia arriba (velocidad inicial) y la gravedad de la tierra.

EJEMPLOS EJERCICIOS RESUELTOS
EJERCICIO 1
Supongamos que se deja caer un cuerpo desde una altura desconocida, después de transcurridos unos seis segundos el objeto toca el suelo.
- ¿Desde que altura se soltó el objeto?
- ¿A que velocidad llego al suelo?
RESOLUCIÓN
Veamos los datos que tenemos
- V0 = 0, la velocidad inicial del cuerpo es cero, es cuando comienza la caída.
- T = 6s, tarda seis segundo en tocar el piso
Ahora apliquemos las formulas de caída libre.

Como podemos ver este ejercicio es sencillo, pero útil para ir afianzando conceptos, por ejemplo que como la aceleración es creciente se la considera con signo positivo.
EJERCICIO 2
Se deja caer una pelota desde la punta de un edificio de 40 metros de altura, supongamos que no existe la resistencia del viento.
- ¿Cuanto tardo la pelota en llegar al piso?
- ¿Con que velocidad llego?
RESOLUCIÓN
Veamos los datos que tenemos
- V0 = 0, la velocidad inicial del cuerpo es cero, es cuando comienza la caída.
- Y = 40 metros

EJERCICIO 3
Supongamos que arrojamos una piedra hacia arriba, ¿a que velocidad la tenemos que lanzar para que alcance una altura máxima de 32 metros?
RESOLUCIÓN
Veamos los datos que tenemos
- Vf = 0, la velocidad final es cero por que el proyectil alcanzo la altura máxima.
- Y = 32 metros
Acá aparece una tercera ecuacion, la que esta enmarcada en verde, esta ecuacion nos relaciona las velocidad con las distancias de manera directa.

Como pudieron ver, estos primeros tres ejercicios son simples, pero lo importante es afianzar los conceptos para luego poder resolver cualquier tipo de ejercicio de caída libre y tito vertical.
Movimiento de proyectiles
- 1. MOVIMIENTO DEPROYECTILES
- 2. MOVIMIENTO DEPROYECTILES.Cuando se lanza un objeto en presencia solamente de uncampo gravitatorio, como el de la tierra, se observa quedicho objeto se eleva, alcanza una determinada altura ycae.
- 3. TIRO PARABÓLICOUn tiro parabólico en el cuerpo se lanza con unángulo de elevación . Es resultado de lacombinación de dos movimientos independientes elprimero es un movimiento uniformemente acelerado(mrua) que se expresa en forma de tiro verticaldurante el ascenso y como caída libre desde elmomento que empieza a descender.
- 4. REPRESENTACIÓN GRAFICA DEL TIRO PARABÓLICO.En la figura se muestra un esquema de unatrayectoria parabólica. Se observa que lavelocidad inicial, como todo vector, se separaen sus componentes rectangulares: lacomponente horizontal, Vx y la componentevertical Vy…
- 5. Durante el ascenso, la componente vertical de vectorvelocidad Vy, disminuye conforme se eleva, por lo quesu magnitud es cada ves mas pequeña: se hace cero unmomento en el punto mas alto y de nuevo empieza acrecer a medida que el cuerpo cae.
- 6. Por su parte la velocidad horizontal Vx, permanececonstante, por lo que su magnitud no se altera.En la trayectoria analizada solo se muestran los puntos demayor interés para describir este movimiento. Dichospuntos son:• Angulo de disparo: Es la inclinación con la que saleimpulsado el proyectil. Se mide respecto al plano horizontalcomo se muestra en la figura:•Velocidad inicial: Es la velocidad con la que el proyectilemprende el movimiento de tiro parabólico y que essuministrada por un agente externo como se muestra en lafigura:
- 7. TIRO HORIZONTALEl tiro horizontal se diferencia del tiro parabólico enque al inicio del movimiento el proyectil sólo presentauna velocidad horizontal, (Vx), debido a que no existeángulo de inclinación. Por tanto no presentavelocidad vertical inicial, (Viy=0), lo que implica queVx= Vix. Su gráfica característica se muestra en lafigura.
- 8. Al analizar el tiempo de caída de dos cajas lanzadasal mismo tiempo desde un avión que vuelahorizontalmente y con velocidad constante, ambasllegan al suelo al mismo tiempo, aunque la caja 1 sedejó caer libremente, mientras que la caja 2 se lanzóhacia la derecha con cierta velocidad horizontal,probándose con ello la independencia de losmovimientos correspondientes, como se muestra enla figura.
- 9. ECUACIONES DE TIRO HORIZONTAL.
- 10. A CONTINUACIÓN SE PRESENTAN EJEMPLOS DETIRO HORIZONTAL EN LOS QUE SE APLICAN LASECUACIONES Y LOS CONCEPTOS:Un lanzador de beisbol arroja una pelota horizontalmente desdelo alto de un barranco a una velocidad de 9 m/s. Calcular:distancia horizontal y vertical a los 1.5s de caída.
- 11. Movimiento de proyectiles Tiro parabólico Tiro horizontal Es resultado de lacombinación de dos Sólo presenta una movimientos velocidad horizontal, independientes. Ángulo de disparo debido a que no existe ángulo de inclinación, no presenta velocidad vertical inicial. Velocidad inicial Es la inclinación con la que sale impulsado el proyectil. Es la velocidad con la que el proyectil emprende el movimiento de tiro parabólico.
- 12. CONCLUSIÓN DEL TEMAEl equipo llegó a la conclusión de que los dos tiposexistentes de movimientos de proyectiles son, el tiroparabólico y el tiro horizontal.El tiro parabólico es el resultado de dos movimientosdiferentes; el primer movimiento es durante elascenso es decir, cuando es lanzado y otro cuandocae durante el descenso; y el tiro horizontal sedistingue del tiro parabólico porque al inicio delmovimiento el proyectil sólo presenta una velocidadhorizontal y es el resultado de un solo movimiento nocomo el parabólico.
Ejemplo. Se dispara un proyectil de mortero con un ángulo de elevación de 30º y una velocidad inicial de 40 m/s sobre un terreno horizontal. Calcular: a) El tiempo que tarda en llegar a la tierra; b) El alcance horizontal del proyectil.

Se tiene el valor de la magnitud de la velocidad inicial y el ángulo de elevación. A partir de ello, se pueden encontrar las componentes de la velocidad inicial Vox y Voy:
Vox = Vo cos θ = (40 m/s) cos (30º) = 34.64 m/s. (Ésta es constante)
Voy = Vo Sen θ = (40 m/s) sen (30º) = 20.0 m/s.
a) Si analizamos el tiempo en el que el proyectil tarda en llegar a la altura máxima, podemos encontrar el tiempo total del movimiento, debido a que es un movimiento parabólico completo. Suponga que tº es el tiempo en llegar a la altura máxima.
En el punto de la altura máxima, Vfy = 0 m/s. El valor de la aceleración de la gravedad, para el marco de referencia en la figura, siempre es negativo (un vector dirigido siempre hacia abajo).
De la ecuación de caída libre:
Como tº = t/2, donde t es el tiempo total del movimiento:
t = 2 * (2.04 s) = 4.08 s
b) El tiempo total del movimiento es el mismo tiempo en el que se obtiene el alcance horizontal. De M.R.U.:

d = Xmax = Vx * t = (34.64 m/s) * (4.08 s) = 141.33 m
El movimiento circular uniformemente acelerado (MCUA) se presenta cuando una partícula o cuerpo sólido describe una trayectoria circular aumentando o disminuyendo la velocidad de forma constante en cada unidad de tiempo. Es decir, la partícula se mueve con aceleración constante.
En el dibujo se observa un ejemplo en donde la velocidad aumenta linealmente en el tiempo. Suponiendo que el tiempo en llegar del punto P1 a P2 sea una unidad de tiempo, la partícula viaja con una aceleración tangencial uniforme v, incrementándose esa cantidad en cada unidad de tiempo.
Posición
ANUNCIOS

El desplazamiento de la partícula es más rápido o más lento según avanza el tiempo. El ángulo recorrido (θ) en un intervalo de tiempo t se calcula por la siguiente fórmula:

Aplicando la fórmula del incremento de ángulo calculamos la posición en la que estará la partícula pasado un tiempo t se obtiene la fórmula de la posición:

Velocidad angular
La velocidad angular aumenta o disminuye linealmente cuando pasa una unidad del tiempo. Por lo tanto, podemos calcular la velocidad angular en el instante t como:

El sentido de la aceleración angular α puede ser contrario al de la velocidad angular ω. Si la aceleración angular es negativa, seria un caso de movimiento circular uniformemente retardado.
Velocidad tangencial
La velocidad tangencial es el producto de la velocidad angular por el radio r. La velocidad tangencial también se incrementa linealmente mediante la siguiente fórmula:

Dándose aquí igualmente la posibilidad de aceleración negativa que se ha descrito en el apartado anterior.
Aceleración angular
La aceleración angular en el movimiento circular uniformemente acelerado es constante. Se calcula como el incremento de velocidad angular ω desde el instante inicial hasta el final partido por el tiempo.

Aceleración tangencial
La aceleración tangencial en el movimiento circular uniformemente acelerado MCUA se calcula como el incremento de velocidad v desde el instante inicial hasta el final partido por el tiempo.

Aceleración centrípeta
La aceleración centrípeta en el MCUA se halla mediante:

Componentes intrínsecas de la aceleración

La velocidad tangencial por la trayectoria en un punto P es v. En un intervalo de tiempo pequeño Δt, la velocidad incrementa a v’ en el punto P’, después de haber descrito un ángulo Δφ.
En la figura se puede ver el incremento de la velocidad tangencial Δv descompuesta en dos componentes: la tangencial Δvt y la normal (o centrípeta) Δvn.
Si dividimos ambas componentes de la velocidad por Δt, tendremos las componentes intrínsecas de la aceleración: la aceleración tangencial at y la aceleración normal an (o centrípeta).
Período
En el MCUA la velocidad angular cambia respecto al tiempo. Por tanto, el período cada vez será menor o mayor según si decrece o crece la velocidad angular.

Frecuencia
La frecuencia en el caso del MCUA es mayor o menor porque la velocidad angular cambia. La fórmula de la frecuencia será:

Fuerza Centrípeta
Cualquier movimiento sobre un camino curvo, representa un movimiento acelerado, y por tanto requiere una fuerza dirigida hacia el centro de la curvatura del camino. Esta fuerza se llama fuerza centrípeta, que significa fuerza "buscando el centro". La fuerza tiene la magnitud
El balanceo de una masa en una cuerda requiere tensión en la cuerda, y si la cuerda se rompe, la masa recorrerá un camino tangencial en línea recta.
La aceleración centrípeta se puede derivar para el caso de movimiento circular puesto que el camino curvado en cualquier punto, puede extenderse hasta formar un círculo.
 | Note que la fuerza centrípeta es proporcional al cuadrado de la velocidad, con lo que doblando la velocidad necesitará cuatro veces la fuerza centrípeta para mantener el movimiento en un círculo. La fuerza centrípeta la tiene que proporcionar la fricción a lo largo de la curva. Si esta fricción es insuficiente un incremento de la velocidad nos puede llevar a un derrape inesperado. |
Las fórmulas importantes para este capítulo son las siguientes:

Donde:
- θ = desplazamiento angular (rad).
- w = velocidad angular (rad/s).
- t = tiempo (s).
- vt = velocidad tangencial (m/s).
- ac = aceleración centrípeta (m/s2)
- T = período (s). Se refiere al tiempo empleado para dar una vuelta completa.
- f = frecuencia (Hz). Es el número de vueltas por unidad de tiempo que da el cuerpo.
En este capítulo, la clave es trabajar con las unidades de manera correcta, como veremos en los ejercicios, se mezclan radianes con sexagesimales y revoluciones, hertzios, minutos, centímetros y otras unidades más.
Guía de Ejercicios
Durante los videos iremos resolviendo algunos de los ejercicios planteados en esta guía, los demás, quedarán para que puedas practicar en casa:
Nivel 1
En el primer nivel revisamos un poco de teoría, y un ejercicio para revisar como aplicar las fórmulas del capítulo.
Período vs Frecuencia
Es un tema que siempre vendrá en los ejercicios, y hemos preparado un pequeño video explicando las diferencias entre período y frecuencia con ayuda de un caso práctico.
- Las TURBINAS DE VIENTOcomo éstas pueden generarenergía significativa en unaforma que esambientalmente amistosa yrenovable. Los conceptos deaceleración rotacional,velocidad angular,desplazamiento angular,inercia rotacional y otrostemas que se discuten eneste capítulo son útiles paradescribir la operación de lasturbinas de viento.
- 3. Objetivos: Después de completar este módulo, deberá:• Definir y aplicar los conceptos de desplazamiento, velocidad y aceleración angular.• Dibujar analogías que relacionan parámetros de movimiento rotacional ( , , ) con lineal (x, v, a) y resolver problemas rotacionales.• Escribir y aplicar relaciones entre parámetros lineales y angulares.
- 4. Objetivos: (continuación)• Definir el momento de inercia y aplicarlo para muchos objetos regulares en rotación.• Aplicar los siguientes conceptos a rotación: 1. Trabajo, energía y potencia rotacional 2. Energía cinética y cantidad de movimiento rotacional 3. Conservación de cantidad de movimiento angular
- 5. Desplazamiento rotacional, Considere un disco que rota de A a B: B Desplazamiento angular : A Medido en revoluciones, grados o radianes. 1 rev = 360 0 = 2 rad La mejor medida para rotación de cuerpos rígidos es el radián.
- 6. Definición del radiánUn radián es el ángulo subtendido alcentro de un círculo por una longitudde arco s igual al radio R del círculo. s s R R 1 rad = = 57.30 R
- 7. Ejemplo 1: Una cuerda se enrolla muchasveces alrededor de un tambor de 50 cm deradio. ¿Cuántas revoluciones del tambor serequieren para subir una cubeta a unaaltura de 20 m? s 20 m = 40 rad R R 0.50 mAhora, 1 rev = 2 rad 1 rev 40 rad h = 20 m 2 rad = 6.37 rev
- 8. Ejemplo 2: Una llanta de bicicleta tiene unradio de 25 cm. Si la rueda da 400 rev,¿cuánto habrá recorrido la bicicleta? 2 rad 400 rev 1 rev = 2513 rads= R = 2513 rad (0.25 m) s = 628 m
- 9. Velocidad angular La velocidad angular, es la tasa de cambio en el desplazamiento angular. (radianes por segundo) Velocidad angular en rad/s. tLa velocidad angular también se puede dar comola frecuencia de revolución, f (rev/s o rpm): f Frecuencia angular f (rev/s).
- 10. Ejemplo 3: Una cuerda se enrolla muchasveces alrededor de un tambor de 20 cm deradio. ¿Cuál es la velocidad angular deltambor si levanta la cubeta a 10 m en 5 s? s 10 m = 50 rad R R 0.20 m 50 rad t 5s h = 10 m = 10.0 rad/s
- 11. Ejemplo 4: En el ejemplo anterior, ¿cuál esla frecuencia de revolución para el tambor?Recuerde que = 10.0 rad/s. 2 f or f 2 R 10.0 rad/s f 1.59 rev/s 2 rad/revO, dado que 60 s = 1 min: rev 60 s rev h = 10 mf 1.59 95.5 s 1 min min f = 95.5 rpm
- 12. Aceleración angular La aceleración angular es la tasa de cambio en velocidad angular. (radianes por s por s) Aceleración angular (rad/s2 ) tLa aceleración angular también se puede encontrar apartir del cambio en frecuencia, del modo siguiente: 2 ( f) pues 2 f t
- 13. Ejemplo 5: El bloque se levanta desde elreposo hasta que la velocidad angular deltambor es 16 rad/s después de 4 s. ¿Cuáles la aceleración angular promedio? 0 f o f or R t t 16 rad/s rad 4.00 2 4s s h = 20 m = 4.00 rad/s2
- 14. Rapidez angular y linealDe la definición de desplazamiento angular : s = R Desplazamiento lineal contra angular s R v R v= R t t t Rapidez lineal = rapidez angular x radio
- 15. Aceleración angular y lineal: De la relación de velocidad se tiene: v = R Velocidad lineal contra angular v v R vv R a= R t t t Acel. lineal = Acel. angular x radio
- 16. Ejemplo: R1 AConsidere disco rotatorio plano: B = 0; = 20 rad/s R2 f t=4s R1 = 20 cm ¿Cuál es la rapidez lineal R2 = 40 cmfinal en los puntos A y B? vAf = Af R1 = (20 rad/s)(0.2 m); vAf = 4 m/s vAf = Bf R1 = (20 rad/s)(0.4 m); vBf = 8 m/s
- 17. Ejemplo de aceleración Considere disco rotatorio R1 A plano: = 0; = 20 rad/s f B t=4s R2 ¿Cuáles son las aceleraciones R1 = 20 cmangular y lineal promedio en B? R2 = 40 cm f 0 20 rad/s = 5.00 rad/s2 t 4s a = R = (5 rad/s2)(0.4 m) a = 2.00 m/s2
- 18. Parámetros angulares contra linealesRecuerde la definición de vf v0aceleración lineal a de la a tcinemática.Pero a = R y v = R, así que puede escribir: vf v0 R R a se vuelve R f 0 t tLa aceleración angular es la tasa f 0de cambio en el tiempo de la tvelocidad angular.
- 19. Comparación: lineal contra angular v0 v f 0 fs vt t t t 2 2 vf vo at f o t 1 2 1 2s v0t 2 at 0 t 2 t 1 2 1 2s vf t 2 at f t 2 t 2 2 2 2 2as v f v 0 2 f 0
- 20. Ejemplo lineal: Un automóvil que inicialmente viaja a 20 m/s llega a detenerse en una distancia de 100 m. ¿Cuál fue la aceleración?Seleccione ecuación: 100 m 2as v2 f 2 v0 vo = 20 m/s vf = 0 m/s 0 - vo 2 -(20 m/s)2a= = a = -2.00 m/s2 2s 2(100 m)
- 21. Analogía angular: Un disco (R = 50 cm), que rota a 600 rev/min llega a detenerse después de dar 50 rev. ¿Cuál es la aceleración? Seleccione ecuación: R o = 600 rpm 2 2 = 0 rpm 2 f 0 f = 50 rev rev 2 rad 1 min600 62.8 rad/s 50 rev = 314 rad min 1 rev 60 s 0- o 2 -(62.8 rad/s)2 = = = -6.29 m/s2 2 2(314 rad)
- 22. Estrategia para resolución de problemas: Dibuje y etiquete bosquejo de problema. Indique dirección + de rotación. Mencione lo dado y establezca lo que debe encontrar. Dado: ____, _____, _____ ( , , f, ,t) Encontrar: ____, _____ Selecciones la ecuación que contenga una y no la otra de las cantidades desconocidas y resuelva para la incógnita.
- 23. Ejemplo 6: Un tambor rota en sentido de las manecillas del reloj inicialmente a 100 rpm y experimenta una aceleración constante en dirección contraria de 3 rad/s2 durante 2 s. ¿Cuál es el desplazamiento angular? Dado: = -100 rpm; t = 2 s o = +2 rad/s2 R rev 1 min 2 rad100 10.5 rad/s min 60 s 1 rev 1 2 1 2 o t 2 t ( 10.5)(2) 2 (3)(2) = -20.9 rad + 6 rad = -14.9 rad El desplazamiento neto es en dirección de las manecilla del reloj (-)
TERCER PARCIAL
Las tres leyes de Newton
Las leyes de Newton, también conocidas como leyes del movimiento de Newton,[1] son tres principios a partir de los cuales se explican una gran parte de los problemas planteados en mecánica clásica, en particular aquellos relativos al movimiento de los cuerpos, que revolucionaron los conceptos básicos de la física y el movimiento de los cuerpos en el universo.
Constituyen los cimientos no solo de la dinámica clásica sino también de la física clásica en general. Aunque incluyen ciertas definiciones y en cierto sentido pueden verse como axiomas, Newton afirmó que estaban basadas en observaciones y experimentos cuantitativos; ciertamente no pueden derivarse a partir de otras relaciones más básicas. La demostración de su validez radica en sus predicciones... La validez de esas predicciones fue verificada en todos y cada uno de los casos durante más de dos siglos.[2]
En concreto, la relevancia de estas leyes radica en dos aspectos: por un lado constituyen, junto con la transformación de Galileo, la base de la mecánica clásica, y por otro, al combinar estas leyes con la ley de la gravitación universal, se pueden deducir y explicar las leyes de Kepler sobre el movimiento planetario. Así, las leyes de Newton permiten explicar, por ejemplo, tanto el movimiento de los astros como los movimientos de los proyectiles artificiales creados por el ser humano y toda la mecánica de funcionamiento de las máquinas. Su formulación matemática fue publicada por Isaac Newton en 1687 en su obra Philosophiæ naturalis principia mathematica.[nota 1]
La dinámica de Newton, también llamada dinámica clásica, solo se cumple en los sistemas de referencia inerciales (que se mueven a velocidad constante; la Tierra, aunque gire y rote, se trata como tal a efectos de muchos experimentos prácticos). Solo es aplicable a cuerpos cuya velocidad dista considerablemente de la velocidad de la luz; cuando la velocidad del cuerpo se va aproximando a los 300 000 km/s (lo que ocurriría en los sistemas de referencia no-inerciales) aparecen una serie de fenómenos denominados efectos relativistas. El estudio de estos efectos (contracción de la longitud, por ejemplo) corresponde a la teoría de la relatividad especial, enunciada por Albert Einstein en 1905.
La primera ley del movimiento rebate la idea aristotélica de que un cuerpo solo puede mantenerse en movimiento si se le aplica una fuerza. Newton expone que:
Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter in directum, nisi quatenus illud a viribus impressis cogitur statum suum mutare.[11] Todo cuerpo persevera en su estado de reposo o movimiento uniforme y rectilíneo a no ser que sea obligado a cambiar su estado por fuerzas impresas sobre él.[12]
Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en reposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuya resultante no sea nula. Newton toma en consideración, así, el que los cuerpos en movimiento están sometidos constantemente a fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto de concepciones anteriores que entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si se ejercía sobre ellos una fuerza, pero nunca entendiendo como tal a la fricción.
En consecuencia, un cuerpo que se desplaza con movimiento rectilíneo uniforme implica que no existe ninguna fuerza externa neta o, dicho de otra forma, un objeto en movimiento no se detiene de forma natural si no se aplica una fuerza sobre él. En el caso de los cuerpos en reposo, se entiende que su velocidad es cero, por lo que si esta cambia es porque sobre ese cuerpo se ha ejercido una fuerza neta.
Newton retomó la ley de la inercia de Galileo: la tendencia de un objeto en movimiento a continuar moviéndose en una línea recta, a menos que sufra la influencia de algo que le desvíe de su camino. Newton supuso que si la Luna no salía disparada en línea recta, según una línea tangencial a su órbita, se debía a la presencia de otra fuerza que la empujaba en dirección a la Tierra, y que desviaba constantemente su camino convirtiéndolo en un círculo. Newton llamó a esta fuerza gravedad y creyó que actuaba a distancia. No hay nada que conecte físicamente la Tierra y la Luna y sin embargo la Tierra está constantemente tirando de la Luna hacia nosotros. Newton se sirvió de la tercera ley de Kepler y dedujo matemáticamente la naturaleza de la fuerza de la gravedad. Demostró que la misma fuerza que hacía caer una manzana sobre la Tierra mantenía a la Luna en su órbita.
La primera ley de Newton establece la equivalencia entre el estado de reposo y de movimiento rectilíneo uniforme. Supongamos un sistema de referencia S y otro S´ que se desplaza respecto del primero a una velocidad constante. Si sobre una partícula en reposo en el sistema S´ no actúa una fuerza neta, su estado de movimiento no cambiará y permanecerá en reposo respecto del sistema S´ y con movimiento rectilíneo uniforme respecto del sistema S. La primera ley de Newton se satisface en ambos sistemas de referencia. A estos sistemas en los que se satisfacen las leyes de Newton se les da el nombre de sistemas de referencia inerciales. Ningún sistema de referencia inercial tiene preferencia sobre otro sistema inercial, son equivalentes: este concepto constituye el principio de relatividad de Galileo o newtoniano.
El enunciado fundamental que podemos extraer de la ley de Newton es que
Esta expresión es una ecuación vectorial, ya que las fuerzas llevan dirección y sentido. Por otra parte, cabe destacar que la variación con la que varía la velocidad corresponde a la aceleración.
Sistemas de referencia inercialesEditar
Artículo principal: Sistema de referencia inercial
La primera ley de Newton sirve para definir un tipo especial de sistemas de referencia conocidos como sistemas de referencia inerciales, que son aquellos desde los que se observa que un cuerpo sobre el que no actúa ninguna fuerza neta se mueve con velocidad constante.
Un sistema de referencia con aceleración (y la aceleración normal de un sistema rotatorio se incluye en esta definición) no es un sistema inercial, y la observación de una partícula en reposo en el propio sistema no satisfará las leyes de Newton (puesto que se observará aceleración sin la presencia de fuerza neta alguna). Se denominan sistemas de referencia no inerciales.
https://es.m.wikipedia.org/wiki/Archivo:1ley.jpg https://es.m.wikipedia.org/wiki/Archivo:1ley.jpg
Diferencia de planteamiento de un problema debido a la posibilidad de observarlo desde dos puntos de vista: el punto de vista de un observador externo (inercial) o desde un observador interno
Por ejemplo considérese una plataforma girando con velocidad constante, ω, en la que un objeto está atado al eje de giro mediante una cuerda, y supongamos dos observadores, uno inercial externo a la plataforma y otro no inercial situado sobre ella.[3]
⦁ Observador inercial: desde su punto de vista el bloque se mueve en círculo con velocidad v y está acelerado hacia el centro de la plataforma con una ⦁ aceleración centrípeta . Esta aceleración es consecuencia de la fuerza ejercida por la tensión de la cuerda.
⦁ Observador no inercial: para el observador que gira con la plataforma el objeto está en reposo, a = 0. Es decir, observa una fuerza ficticia que contrarresta la tensión para que no haya aceleración centrípeta. Esa fuerza debe ser . Este observador siente la fuerza como si fuera perfectamente real, aunque solo sea la consecuencia de la aceleración del sistema de referencia en que se encuentra.
En realidad, es imposible encontrar un sistema de referencia inercial, ya que siempre hay algún tipo de fuerzas actuando sobre los cuerpos; no obstante, siempre es posible encontrar un sistema de referencia en el que el problema que estemos estudiando se pueda tratar como si estuviésemos en un sistema inercial. En muchos casos, la Tierra es una buena aproximación de sistema inercial, ya que a pesar de contar con una aceleración traslacional y otra rotacional, ambas son del orden de 0.01 m/s² y, en consecuencia, podemos considerar que un sistema de referencia de un observador en la superficie terrestre es un sistema de referencia inercial.
Aplicación de la primera ley de NewtonEditar
Se puede considerar como ejemplo ilustrativo de esta primera ley una bola atada a una cuerda, de modo que la bola gira siguiendo una trayectoria circular. Debido a la fuerza centrípeta de la cuerda (tensión), la masa sigue la trayectoria circular, pero si en algún momento la cuerda se rompiese, la bola tomaría una trayectoria rectilínea en la dirección de la velocidad que tenía la bola en el instante de rotura.
https://es.m.wikipedia.org/wiki/Archivo:Gifbola1.gif https://es.m.wikipedia.org/wiki/Archivo:Gifbola1.gif
Tras la rotura, la fuerza neta ejercida sobre la bola es 0, por lo que experimentará, como resultado de un estado de reposo, un movimiento rectilíneo uniforme.
Segunda ley de Newton o ley fundamental de la dinámicaEditar
La Segunda Ley de Newton expresa que:
Mutationem motus proportionalem esse vi motrici impressæ, & fieri secundum lineam rectam qua vis illa imprimitur.[11] El cambio de movimiento es directamente proporcional a la fuerza motriz impresa y ocurre según la línea recta a lo largo de la cual aquella fuerza se imprime.[13]
Esta ley se encarga de cuantificar el concepto de fuerza. La aceleración que adquiere un cuerpo es proporcional a la fuerza neta aplicada sobre el mismo. La constante de proporcionalidad es la masa del cuerpo (que puede ser o no ser constante). Entender la fuerza como la causa del cambio de movimiento y la proporcionalidad entre la fuerza impresa y el cambio de la velocidad de un cuerpo es la esencia de esta segunda ley.[14]
Si la masa es constanteEditar
Si la masa del cuerpo es constante se puede establecer la siguiente relación, que constituye la ecuación fundamental de la dinámica:
Donde m es la masa del cuerpo la cual debe ser constante para ser expresada de tal forma. La fuerza neta que actúa sobre un cuerpo, también llamada fuerza resultante, es el vector suma de todas las fuerzas que sobre él actúan. Así pues:[15]
⦁ La ⦁ aceleración que adquiere un cuerpo es proporcional a la fuerza aplicada, y la constante de proporcionalidad es la masa del cuerpo.
⦁ Si actúan varias fuerzas, esta ecuación se refiere a la fuerza resultante, suma vectorial de todas ellas.
⦁ Esta es una ecuación vectorial, luego se debe cumplir componente a componente.
⦁ En ocasiones será útil recordar el concepto de ⦁ componentes intrínsecas: si la trayectoria no es rectilínea es porque hay una aceleración normal, luego habrá también una ⦁ fuerza normal (en dirección perpendicular a la trayectoria); si el ⦁ módulo de la velocidad varía es porque hay una aceleración en la dirección de la velocidad (en la misma dirección de la trayectoria).
⦁ La ⦁ fuerza y la aceleración son vectores paralelos, pero esto no significa que el vector ⦁ velocidad sea paralelo a la fuerza. Es decir, la trayectoria no tiene por qué ser tangente a la fuerza aplicada (sólo ocurre si al menos, la dirección de la velocidad es constante).
⦁ Esta ecuación debe cumplirse para todos los cuerpos. Cuando analicemos un problema con varios cuerpos y diferentes fuerzas aplicadas sobre ellos, deberemos entonces tener en cuenta las fuerzas que actúan sobre cada uno de ellos y el principio de superposición de fuerzas. Aplicaremos la segunda ley de Newton para cada uno de ellos, teniendo en cuenta las interacciones mutuas y obteniendo la fuerza resultante sobre cada uno de ellos.
https://es.m.wikipedia.org/wiki/Archivo:SumatorioFuerzas.jpg https://es.m.wikipedia.org/wiki/Archivo:SumatorioFuerzas.jpg
Representación del sumatorio de las fuerzas. Aquí se está sumando dos veces la fuerza No. 2. La resultante (marcada con rojo) responde a la siguiente ecuación: :
El principio de superposición establece que si varias fuerzas actúan igual o simultáneamente sobre un cuerpo, la fuerza resultante es igual a la suma vectorial de las fuerzas que actúan independientemente sobre el cuerpo (regla del paralelogramo). Este principio aparece incluido en los Principia de Newton como Corolario 1, después de la tercera ley, pero es requisito indispensable para la comprensión y aplicación de las leyes, así como para la caracterización vectorial de las fuerzas.[14] La fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección. Las fuerzas son causas que producen aceleraciones en los cuerpos. Por lo tanto existe una relación causa-efecto entre la fuerza aplicada y la aceleración que se este cuerpo experimenta.
De esta ecuación se obtiene la unidad de medida de la fuerza en el Sistema Internacional de Unidades, el Newton:
Por otra parte, si la fuerza resultante que actúa sobre una partícula no es cero, esta partícula tendrá una aceleración proporcional a la magnitud de la resultante y en dirección de esta (debido a que la masa siempre es un escalar positivo). La expresión anterior así establecida es válida tanto para la mecánica clásica como para la mecánica relativista.
Si la masa no es constanteEditar
Si la masa de los cuerpos varía, como por ejemplo un cohete que va quemando combustible, no es válida la relación y hay que hacer genérica la ley para que incluya el caso de sistemas en los que pueda variar la masa. Para ello primero hay que definir una magnitud física nueva, la cantidad de movimiento, que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:
Newton enunció su ley de una forma más general:
De esta forma se puede relacionar la fuerza con la aceleración y con la masa, sin importar que esta sea o no sea constante. Cuando la masa es constante sale de la derivada con lo que queda la expresión:
Y se obtiene la expresión clásica de la Segunda Ley de Newton:
La fuerza, por lo tanto, es un concepto matemático el cual, por definición, es igual a la derivada con respecto al tiempo del momento de una partícula dada, cuyo valor a su vez depende de su interacción con otras partículas. Por consiguiente, se puede considerar la fuerza como la expresión de una interacción. Otra consecuencia de expresar la Segunda Ley de Newton usando la cantidad de movimiento es lo que se conoce como principio de conservación de la cantidad de movimiento: si la fuerza total que actúa sobre un cuerpo es cero, la Segunda ley de Newton nos dice que
Es decir, la derivada de la cantidad de movimiento con respecto al tiempo es cero en sus tres componentes. Esto significa que la cantidad de movimiento debe ser constante en el tiempo en módulo dirección y sentido (la derivada de un vector constante es cero).[16]
La segunda ley de Newton solo es válida en sistemas de referencia inerciales pero incluso si el sistema de referencia es no inercial, se puede utilizar la misma ecuación incluyendo las fuerzas ficticias (o fuerzas inerciales). Unidades y dimensiones de la fuerza:
⦁ Unidades S.I.:
⦁ Sistema cegesimal: ⦁ dina
⦁ Equivalencia: 1 N= dinas
Cantidad de movimiento o momento linealEditar
En el lenguaje moderno la cantidad de movimiento o momento lineal de un objeto se define mediante la expresión . Es decir, es una magnitud vectorial proporcional a la masa y a la velocidad del objeto. Partiendo de esta definición y aplicando la ley fundamental de la mecánica de Newton, las variaciones de la cantidad de movimiento se expresan en función de la fuerza resultante y el intervalo de tiempo durante el cual se ejerce esta:
Tomando el intervalo de tiempo de t1 a t2 e integrando se obtiene
Al vector I se le denomina impulso lineal y representa una magnitud física que se manifiesta especialmente en las acciones rápidas o impactos, tales como choques, llevando módulo dirección y sentido. En este tipo de acciones conviene considerar la duración del impacto y la fuerza ejercida durante el mismo.
De la expresión obtenida se deduce que el impulso lineal es igual a la variación de la cantidad de movimiento. Si la fuerza resultante es cero (es decir, si no se actúa sobre el objeto) el impulso también es cero y la cantidad de movimiento permanece constante. Llamamos a esta afirmación ley de conservación del impulso lineal, aplicada a un objeto o una partícula.[17]
Sus unidades en el Sistema Internacional son Conservación de la cantidad de movimiento
https://es.m.wikipedia.org/wiki/Archivo:Bolas.gif https://es.m.wikipedia.org/wiki/Archivo:Bolas.gif
Bolas representando choque elástico
Choque elástico: permanecen constantes la cantidad de movimiento y la energía cinética. Dos partículas de masas diferentes que solo interactúan entre sí y que se mueven con velocidades constantes y distintas una hacia la otra. Tras el choque, permanece constante la cantidad de movimiento y la energía cinética.
https://es.m.wikipedia.org/wiki/Archivo:CochesChoque.gif https://es.m.wikipedia.org/wiki/Archivo:CochesChoque.gif
Coches representando choque inelástico
Choque inelástico: permanece constante la cantidad de movimiento y varía la energía cinética. Como consecuencia, los cuerpos que colisionan pueden sufrir deformaciones y aumento de su temperatura. Tras un choque totalmente inelástico, ambos cuerpos tienen la misma velocidad. La suma de sus ⦁ energías cinéticas es menor que la inicial porque una parte de esta se ha transformado en ⦁ energía interna; en la mayoría de los casos llega a ser disipada en forma de calor debido al calentamiento producido en el choque. En el caso ideal de un choque perfectamente inelástico entre objetos macroscópicos, estos permanecen unidos entre sí tras la colisión.⦁ [18]
Aplicaciones de la segunda ley de NewtonEditar
Entre las posibles aplicaciones de la Segunda Ley de Newton, se pueden destacar:
https://es.m.wikipedia.org/wiki/Archivo:Caida-libre.jpg https://es.m.wikipedia.org/wiki/Archivo:Caida-libre.jpg
Caída libre: es un movimiento que se observa cuando un objeto se deja caer desde una cierta altura sobre la superficie de la tierra. Para estudiar el movimiento se elige un sistema de coordenadas donde el origen del eje y está sobre esta última. En este sistema tanto la velocidad de caída como la aceleración de la gravedad tienen signo negativo. En el ejemplo representado, se supone que el objeto se deja caer desde el reposo, pero es posible que caiga desde una velocidad inicial distinta de cero.⦁ [18]
https://es.m.wikipedia.org/wiki/Archivo:Pendulosimple.jpg https://es.m.wikipedia.org/wiki/Archivo:Pendulosimple.jpg
Péndulo Simple: Diagrama de Fuerzas
Péndulo simple: partícula de masa m suspendida del punto O por un hilo inextensible de longitud l y de masa despreciable. Si la partícula se desplaza a una posición θ0 (ángulo que hace el hilo con la vertical) y luego se suelta, el péndulo comienza a oscilar. El ⦁ péndulo describe una trayectoria circular, un arco de una circunferencia de radio l. Las fuerzas que actúan sobre la partícula de masa m son dos, el peso y la ⦁ tensión T del hilo.
Si se aplica la segunda ley, en la dirección radial:
donde an representa la aceleración normal a la trayectoria. Conocido el valor de la velocidad v en la posición angular se puede determinar la tensión T del hilo. Esta es máxima cuando el péndulo pasa por la posición de equilibrio
,
donde el segundo término representa la fuerza centrífuga.
Y la tensión es mínima, en los extremos de su trayectoria, cuando la velocidad es cero
en la dirección tangencial:
donde at representa la aceleración tangente a la trayectoria.
Tercera ley de Newton o principio de acción y reacciónEditar
Reproducir contenido multimedia
Video explicativo sobre la tercera ley de Newton
La tercera ley de Newton establece que siempre que un objeto ejerce una fuerza sobre un segundo objeto, este ejerce una fuerza de igual magnitud y dirección pero en sentido opuesto sobre el primero. Con frecuencia se enuncia así: A cada acción siempre se opone una reacción igual pero de sentido contrario. En cualquier interacción hay un par de fuerzas de acción y reacción situadas en la misma dirección con igual magnitud y sentidos opuestos. La formulación original de Newton es:
Actioni contrariam semper & æqualem esse reactionem: sive corporum duorum actiones in se mutuo semper esse æquales & in partes contrarias dirigi.[11] Con toda acción ocurre siempre una reacción igual y contraria: quiere decir que las acciones mutuas de dos cuerpos siempre son iguales y dirigidas en sentido opuesto.[13]
Esta tercera ley de Newton es completamente original (pues las dos primeras ya habían sido propuestas de otra manera por Galileo, Hooke y Huygens) y hace de las leyes de la mecánica un conjunto lógico y completo.[19] Expone que por cada fuerza que actúa sobre un cuerpo, este realiza una fuerza de igual intensidad, pero de sentido contrario sobre el cuerpo que la produjo. Dicho de otra forma, las fuerzas, situadas sobre la misma recta, siempre se presentan en pares de igual magnitud y de dirección, pero con sentido opuesto. Si dos objetos interaccionan, la fuerza F12, ejercida por el objeto 1 sobre el objeto 2, es igual en magnitud con misma dirección pero sentidos opuestos a la fuerza F21 ejercida por el objeto 2 sobre el objeto 1:[20]
Este principio presupone que la interacción entre dos partículas se propaga instantáneamente en el espacio (lo cual requeriría velocidad infinita), y en su formulación original no es válido para fuerzas electromagnéticas puesto que estas no se propagan por el espacio de modo instantáneo sino que lo hacen a velocidad finita "c". Este principio relaciona dos fuerzas que no están aplicadas al mismo cuerpo, produciendo en ellos aceleraciones diferentes, según sean sus masas. Por lo demás, cada una de esas fuerzas obedece por separado a la segunda ley. Junto con las anteriores leyes, esta permite enunciar los principios de conservación del momento lineal y del momento angular.[14]
https://es.m.wikipedia.org/wiki/Archivo:Animacionfinal.gif https://es.m.wikipedia.org/wiki/Archivo:Animacionfinal.gif
La fuerza de reacción (flecha verde) aumenta conforme aumenta la aplicada al objeto, la fuerza aplicada (flecha roja)
Aplicaciones de la Tercera Ley de NewtonEditar
Algunos ejemplos donde actúan las fuerzas acción-reacción son los siguientes:[20]
⦁ Si una persona empuja a otra de peso similar, las dos se mueven con la misma velocidad pero en sentido contrario.
⦁ Cuando saltamos, empujamos a la tierra hacia abajo, que no se mueve debido a su gran masa, y esta nos empuja con la misma intensidad hacia arriba.
⦁ Una persona que rema en un bote empuja el agua con el remo en un sentido y el agua responde empujando el bote en sentido opuesto.
⦁ Cuando caminamos empujamos a la tierra hacia atrás con nuestros pies, a lo que la tierra responde empujándonos a nosotros hacia delante, haciendo que avancemos.
⦁ Cuando se dispara una bala, la explosión de la pólvora ejerce una fuerza sobre la pistola (que es el retroceso que sufren las armas de fuego al ser disparadas), la cual reacciona ejerciendo una fuerza de igual intensidad pero en sentido contrario sobre la bala.
⦁ La fuerza de reacción que una superficie ejerce sobre un objeto apoyado en ella, llamada fuerza normal con dirección perpendicular a la superficie.
https://es.m.wikipedia.org/wiki/Archivo:Tierra-luna.jpg https://es.m.wikipedia.org/wiki/Archivo:Tierra-luna.jpg
⦁ Las fuerzas a distancia no son una excepción, como la fuerza que la Tierra ejerce sobre la Luna y viceversa, su correspondiente pareja de acción y reacción:⦁ [21]
La fuerza que ejerce la Tierra sobre la Luna es exactamente igual (y de signo contrario) a la que ejerce la Luna sobre la Tierra y su valor viene determinado por la ley de gravitación universal enunciada por Newton, que establece que la fuerza que ejerce un objeto sobre otro es directamente proporcional al producto de sus masas, e inversamente proporcional al cuadrado de la distancia que los separa. La fuerza que la Tierra ejerce sobre la Luna es la responsable de que esta no se salga de su órbita circular.
Además, la fuerza que la Luna ejerce sobre la Tierra es también responsable de las mareas, pues conforme la Luna gira alrededor de la Tierra esta ejerce una fuerza de atracción sobre la superficie terrestre, la cual eleva los mares y océanos, elevando varios metros el nivel del agua en algunos lugares; por este motivo esta fuerza también se llama fuerza de marea. La fuerza de marea de la luna se compone con la fuerza de marea del sol proporcionando el fenómeno completo de las mareas.
Constituyen los cimientos no solo de la dinámica clásica sino también de la física clásica en general. Aunque incluyen ciertas definiciones y en cierto sentido pueden verse como axiomas, Newton afirmó que estaban basadas en observaciones y experimentos cuantitativos; ciertamente no pueden derivarse a partir de otras relaciones más básicas. La demostración de su validez radica en sus predicciones... La validez de esas predicciones fue verificada en todos y cada uno de los casos durante más de dos siglos.[2]
En concreto, la relevancia de estas leyes radica en dos aspectos: por un lado constituyen, junto con la transformación de Galileo, la base de la mecánica clásica, y por otro, al combinar estas leyes con la ley de la gravitación universal, se pueden deducir y explicar las leyes de Kepler sobre el movimiento planetario. Así, las leyes de Newton permiten explicar, por ejemplo, tanto el movimiento de los astros como los movimientos de los proyectiles artificiales creados por el ser humano y toda la mecánica de funcionamiento de las máquinas. Su formulación matemática fue publicada por Isaac Newton en 1687 en su obra Philosophiæ naturalis principia mathematica.[nota 1]
La dinámica de Newton, también llamada dinámica clásica, solo se cumple en los sistemas de referencia inerciales (que se mueven a velocidad constante; la Tierra, aunque gire y rote, se trata como tal a efectos de muchos experimentos prácticos). Solo es aplicable a cuerpos cuya velocidad dista considerablemente de la velocidad de la luz; cuando la velocidad del cuerpo se va aproximando a los 300 000 km/s (lo que ocurriría en los sistemas de referencia no-inerciales) aparecen una serie de fenómenos denominados efectos relativistas. El estudio de estos efectos (contracción de la longitud, por ejemplo) corresponde a la teoría de la relatividad especial, enunciada por Albert Einstein en 1905.
La primera ley del movimiento rebate la idea aristotélica de que un cuerpo solo puede mantenerse en movimiento si se le aplica una fuerza. Newton expone que:
Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter in directum, nisi quatenus illud a viribus impressis cogitur statum suum mutare.[11] Todo cuerpo persevera en su estado de reposo o movimiento uniforme y rectilíneo a no ser que sea obligado a cambiar su estado por fuerzas impresas sobre él.[12]
Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en reposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuya resultante no sea nula. Newton toma en consideración, así, el que los cuerpos en movimiento están sometidos constantemente a fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto de concepciones anteriores que entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si se ejercía sobre ellos una fuerza, pero nunca entendiendo como tal a la fricción.
En consecuencia, un cuerpo que se desplaza con movimiento rectilíneo uniforme implica que no existe ninguna fuerza externa neta o, dicho de otra forma, un objeto en movimiento no se detiene de forma natural si no se aplica una fuerza sobre él. En el caso de los cuerpos en reposo, se entiende que su velocidad es cero, por lo que si esta cambia es porque sobre ese cuerpo se ha ejercido una fuerza neta.
Newton retomó la ley de la inercia de Galileo: la tendencia de un objeto en movimiento a continuar moviéndose en una línea recta, a menos que sufra la influencia de algo que le desvíe de su camino. Newton supuso que si la Luna no salía disparada en línea recta, según una línea tangencial a su órbita, se debía a la presencia de otra fuerza que la empujaba en dirección a la Tierra, y que desviaba constantemente su camino convirtiéndolo en un círculo. Newton llamó a esta fuerza gravedad y creyó que actuaba a distancia. No hay nada que conecte físicamente la Tierra y la Luna y sin embargo la Tierra está constantemente tirando de la Luna hacia nosotros. Newton se sirvió de la tercera ley de Kepler y dedujo matemáticamente la naturaleza de la fuerza de la gravedad. Demostró que la misma fuerza que hacía caer una manzana sobre la Tierra mantenía a la Luna en su órbita.
La primera ley de Newton establece la equivalencia entre el estado de reposo y de movimiento rectilíneo uniforme. Supongamos un sistema de referencia S y otro S´ que se desplaza respecto del primero a una velocidad constante. Si sobre una partícula en reposo en el sistema S´ no actúa una fuerza neta, su estado de movimiento no cambiará y permanecerá en reposo respecto del sistema S´ y con movimiento rectilíneo uniforme respecto del sistema S. La primera ley de Newton se satisface en ambos sistemas de referencia. A estos sistemas en los que se satisfacen las leyes de Newton se les da el nombre de sistemas de referencia inerciales. Ningún sistema de referencia inercial tiene preferencia sobre otro sistema inercial, son equivalentes: este concepto constituye el principio de relatividad de Galileo o newtoniano.
El enunciado fundamental que podemos extraer de la ley de Newton es que
Esta expresión es una ecuación vectorial, ya que las fuerzas llevan dirección y sentido. Por otra parte, cabe destacar que la variación con la que varía la velocidad corresponde a la aceleración.
Sistemas de referencia inercialesEditar
Artículo principal: Sistema de referencia inercial
La primera ley de Newton sirve para definir un tipo especial de sistemas de referencia conocidos como sistemas de referencia inerciales, que son aquellos desde los que se observa que un cuerpo sobre el que no actúa ninguna fuerza neta se mueve con velocidad constante.
Un sistema de referencia con aceleración (y la aceleración normal de un sistema rotatorio se incluye en esta definición) no es un sistema inercial, y la observación de una partícula en reposo en el propio sistema no satisfará las leyes de Newton (puesto que se observará aceleración sin la presencia de fuerza neta alguna). Se denominan sistemas de referencia no inerciales.
https://es.m.wikipedia.org/wiki/Archivo:1ley.jpg https://es.m.wikipedia.org/wiki/Archivo:1ley.jpg
Diferencia de planteamiento de un problema debido a la posibilidad de observarlo desde dos puntos de vista: el punto de vista de un observador externo (inercial) o desde un observador interno
Por ejemplo considérese una plataforma girando con velocidad constante, ω, en la que un objeto está atado al eje de giro mediante una cuerda, y supongamos dos observadores, uno inercial externo a la plataforma y otro no inercial situado sobre ella.[3]
⦁ Observador inercial: desde su punto de vista el bloque se mueve en círculo con velocidad v y está acelerado hacia el centro de la plataforma con una ⦁ aceleración centrípeta . Esta aceleración es consecuencia de la fuerza ejercida por la tensión de la cuerda.
⦁ Observador no inercial: para el observador que gira con la plataforma el objeto está en reposo, a = 0. Es decir, observa una fuerza ficticia que contrarresta la tensión para que no haya aceleración centrípeta. Esa fuerza debe ser . Este observador siente la fuerza como si fuera perfectamente real, aunque solo sea la consecuencia de la aceleración del sistema de referencia en que se encuentra.
En realidad, es imposible encontrar un sistema de referencia inercial, ya que siempre hay algún tipo de fuerzas actuando sobre los cuerpos; no obstante, siempre es posible encontrar un sistema de referencia en el que el problema que estemos estudiando se pueda tratar como si estuviésemos en un sistema inercial. En muchos casos, la Tierra es una buena aproximación de sistema inercial, ya que a pesar de contar con una aceleración traslacional y otra rotacional, ambas son del orden de 0.01 m/s² y, en consecuencia, podemos considerar que un sistema de referencia de un observador en la superficie terrestre es un sistema de referencia inercial.
Aplicación de la primera ley de NewtonEditar
Se puede considerar como ejemplo ilustrativo de esta primera ley una bola atada a una cuerda, de modo que la bola gira siguiendo una trayectoria circular. Debido a la fuerza centrípeta de la cuerda (tensión), la masa sigue la trayectoria circular, pero si en algún momento la cuerda se rompiese, la bola tomaría una trayectoria rectilínea en la dirección de la velocidad que tenía la bola en el instante de rotura.
https://es.m.wikipedia.org/wiki/Archivo:Gifbola1.gif https://es.m.wikipedia.org/wiki/Archivo:Gifbola1.gif
Tras la rotura, la fuerza neta ejercida sobre la bola es 0, por lo que experimentará, como resultado de un estado de reposo, un movimiento rectilíneo uniforme.
Segunda ley de Newton o ley fundamental de la dinámicaEditar
La Segunda Ley de Newton expresa que:
Mutationem motus proportionalem esse vi motrici impressæ, & fieri secundum lineam rectam qua vis illa imprimitur.[11] El cambio de movimiento es directamente proporcional a la fuerza motriz impresa y ocurre según la línea recta a lo largo de la cual aquella fuerza se imprime.[13]
Esta ley se encarga de cuantificar el concepto de fuerza. La aceleración que adquiere un cuerpo es proporcional a la fuerza neta aplicada sobre el mismo. La constante de proporcionalidad es la masa del cuerpo (que puede ser o no ser constante). Entender la fuerza como la causa del cambio de movimiento y la proporcionalidad entre la fuerza impresa y el cambio de la velocidad de un cuerpo es la esencia de esta segunda ley.[14]
Si la masa es constanteEditar
Si la masa del cuerpo es constante se puede establecer la siguiente relación, que constituye la ecuación fundamental de la dinámica:
Donde m es la masa del cuerpo la cual debe ser constante para ser expresada de tal forma. La fuerza neta que actúa sobre un cuerpo, también llamada fuerza resultante, es el vector suma de todas las fuerzas que sobre él actúan. Así pues:[15]
⦁ La ⦁ aceleración que adquiere un cuerpo es proporcional a la fuerza aplicada, y la constante de proporcionalidad es la masa del cuerpo.
⦁ Si actúan varias fuerzas, esta ecuación se refiere a la fuerza resultante, suma vectorial de todas ellas.
⦁ Esta es una ecuación vectorial, luego se debe cumplir componente a componente.
⦁ En ocasiones será útil recordar el concepto de ⦁ componentes intrínsecas: si la trayectoria no es rectilínea es porque hay una aceleración normal, luego habrá también una ⦁ fuerza normal (en dirección perpendicular a la trayectoria); si el ⦁ módulo de la velocidad varía es porque hay una aceleración en la dirección de la velocidad (en la misma dirección de la trayectoria).
⦁ La ⦁ fuerza y la aceleración son vectores paralelos, pero esto no significa que el vector ⦁ velocidad sea paralelo a la fuerza. Es decir, la trayectoria no tiene por qué ser tangente a la fuerza aplicada (sólo ocurre si al menos, la dirección de la velocidad es constante).
⦁ Esta ecuación debe cumplirse para todos los cuerpos. Cuando analicemos un problema con varios cuerpos y diferentes fuerzas aplicadas sobre ellos, deberemos entonces tener en cuenta las fuerzas que actúan sobre cada uno de ellos y el principio de superposición de fuerzas. Aplicaremos la segunda ley de Newton para cada uno de ellos, teniendo en cuenta las interacciones mutuas y obteniendo la fuerza resultante sobre cada uno de ellos.
https://es.m.wikipedia.org/wiki/Archivo:SumatorioFuerzas.jpg https://es.m.wikipedia.org/wiki/Archivo:SumatorioFuerzas.jpg
Representación del sumatorio de las fuerzas. Aquí se está sumando dos veces la fuerza No. 2. La resultante (marcada con rojo) responde a la siguiente ecuación: :
El principio de superposición establece que si varias fuerzas actúan igual o simultáneamente sobre un cuerpo, la fuerza resultante es igual a la suma vectorial de las fuerzas que actúan independientemente sobre el cuerpo (regla del paralelogramo). Este principio aparece incluido en los Principia de Newton como Corolario 1, después de la tercera ley, pero es requisito indispensable para la comprensión y aplicación de las leyes, así como para la caracterización vectorial de las fuerzas.[14] La fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección. Las fuerzas son causas que producen aceleraciones en los cuerpos. Por lo tanto existe una relación causa-efecto entre la fuerza aplicada y la aceleración que se este cuerpo experimenta.
De esta ecuación se obtiene la unidad de medida de la fuerza en el Sistema Internacional de Unidades, el Newton:
Por otra parte, si la fuerza resultante que actúa sobre una partícula no es cero, esta partícula tendrá una aceleración proporcional a la magnitud de la resultante y en dirección de esta (debido a que la masa siempre es un escalar positivo). La expresión anterior así establecida es válida tanto para la mecánica clásica como para la mecánica relativista.
Si la masa no es constanteEditar
Si la masa de los cuerpos varía, como por ejemplo un cohete que va quemando combustible, no es válida la relación y hay que hacer genérica la ley para que incluya el caso de sistemas en los que pueda variar la masa. Para ello primero hay que definir una magnitud física nueva, la cantidad de movimiento, que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:
Newton enunció su ley de una forma más general:
De esta forma se puede relacionar la fuerza con la aceleración y con la masa, sin importar que esta sea o no sea constante. Cuando la masa es constante sale de la derivada con lo que queda la expresión:
Y se obtiene la expresión clásica de la Segunda Ley de Newton:
La fuerza, por lo tanto, es un concepto matemático el cual, por definición, es igual a la derivada con respecto al tiempo del momento de una partícula dada, cuyo valor a su vez depende de su interacción con otras partículas. Por consiguiente, se puede considerar la fuerza como la expresión de una interacción. Otra consecuencia de expresar la Segunda Ley de Newton usando la cantidad de movimiento es lo que se conoce como principio de conservación de la cantidad de movimiento: si la fuerza total que actúa sobre un cuerpo es cero, la Segunda ley de Newton nos dice que
Es decir, la derivada de la cantidad de movimiento con respecto al tiempo es cero en sus tres componentes. Esto significa que la cantidad de movimiento debe ser constante en el tiempo en módulo dirección y sentido (la derivada de un vector constante es cero).[16]
La segunda ley de Newton solo es válida en sistemas de referencia inerciales pero incluso si el sistema de referencia es no inercial, se puede utilizar la misma ecuación incluyendo las fuerzas ficticias (o fuerzas inerciales). Unidades y dimensiones de la fuerza:
⦁ Unidades S.I.:
⦁ Sistema cegesimal: ⦁ dina
⦁ Equivalencia: 1 N= dinas
Cantidad de movimiento o momento linealEditar
En el lenguaje moderno la cantidad de movimiento o momento lineal de un objeto se define mediante la expresión . Es decir, es una magnitud vectorial proporcional a la masa y a la velocidad del objeto. Partiendo de esta definición y aplicando la ley fundamental de la mecánica de Newton, las variaciones de la cantidad de movimiento se expresan en función de la fuerza resultante y el intervalo de tiempo durante el cual se ejerce esta:
Tomando el intervalo de tiempo de t1 a t2 e integrando se obtiene
Al vector I se le denomina impulso lineal y representa una magnitud física que se manifiesta especialmente en las acciones rápidas o impactos, tales como choques, llevando módulo dirección y sentido. En este tipo de acciones conviene considerar la duración del impacto y la fuerza ejercida durante el mismo.
De la expresión obtenida se deduce que el impulso lineal es igual a la variación de la cantidad de movimiento. Si la fuerza resultante es cero (es decir, si no se actúa sobre el objeto) el impulso también es cero y la cantidad de movimiento permanece constante. Llamamos a esta afirmación ley de conservación del impulso lineal, aplicada a un objeto o una partícula.[17]
Sus unidades en el Sistema Internacional son Conservación de la cantidad de movimiento
https://es.m.wikipedia.org/wiki/Archivo:Bolas.gif https://es.m.wikipedia.org/wiki/Archivo:Bolas.gif
Bolas representando choque elástico
Choque elástico: permanecen constantes la cantidad de movimiento y la energía cinética. Dos partículas de masas diferentes que solo interactúan entre sí y que se mueven con velocidades constantes y distintas una hacia la otra. Tras el choque, permanece constante la cantidad de movimiento y la energía cinética.
https://es.m.wikipedia.org/wiki/Archivo:CochesChoque.gif https://es.m.wikipedia.org/wiki/Archivo:CochesChoque.gif
Coches representando choque inelástico
Choque inelástico: permanece constante la cantidad de movimiento y varía la energía cinética. Como consecuencia, los cuerpos que colisionan pueden sufrir deformaciones y aumento de su temperatura. Tras un choque totalmente inelástico, ambos cuerpos tienen la misma velocidad. La suma de sus ⦁ energías cinéticas es menor que la inicial porque una parte de esta se ha transformado en ⦁ energía interna; en la mayoría de los casos llega a ser disipada en forma de calor debido al calentamiento producido en el choque. En el caso ideal de un choque perfectamente inelástico entre objetos macroscópicos, estos permanecen unidos entre sí tras la colisión.⦁ [18]
Aplicaciones de la segunda ley de NewtonEditar
Entre las posibles aplicaciones de la Segunda Ley de Newton, se pueden destacar:
https://es.m.wikipedia.org/wiki/Archivo:Caida-libre.jpg https://es.m.wikipedia.org/wiki/Archivo:Caida-libre.jpg
Caída libre: es un movimiento que se observa cuando un objeto se deja caer desde una cierta altura sobre la superficie de la tierra. Para estudiar el movimiento se elige un sistema de coordenadas donde el origen del eje y está sobre esta última. En este sistema tanto la velocidad de caída como la aceleración de la gravedad tienen signo negativo. En el ejemplo representado, se supone que el objeto se deja caer desde el reposo, pero es posible que caiga desde una velocidad inicial distinta de cero.⦁ [18]
https://es.m.wikipedia.org/wiki/Archivo:Pendulosimple.jpg https://es.m.wikipedia.org/wiki/Archivo:Pendulosimple.jpg
Péndulo Simple: Diagrama de Fuerzas
Péndulo simple: partícula de masa m suspendida del punto O por un hilo inextensible de longitud l y de masa despreciable. Si la partícula se desplaza a una posición θ0 (ángulo que hace el hilo con la vertical) y luego se suelta, el péndulo comienza a oscilar. El ⦁ péndulo describe una trayectoria circular, un arco de una circunferencia de radio l. Las fuerzas que actúan sobre la partícula de masa m son dos, el peso y la ⦁ tensión T del hilo.
Si se aplica la segunda ley, en la dirección radial:
donde an representa la aceleración normal a la trayectoria. Conocido el valor de la velocidad v en la posición angular se puede determinar la tensión T del hilo. Esta es máxima cuando el péndulo pasa por la posición de equilibrio
,
donde el segundo término representa la fuerza centrífuga.
Y la tensión es mínima, en los extremos de su trayectoria, cuando la velocidad es cero
en la dirección tangencial:
donde at representa la aceleración tangente a la trayectoria.
Tercera ley de Newton o principio de acción y reacciónEditar
Reproducir contenido multimedia
Video explicativo sobre la tercera ley de Newton
La tercera ley de Newton establece que siempre que un objeto ejerce una fuerza sobre un segundo objeto, este ejerce una fuerza de igual magnitud y dirección pero en sentido opuesto sobre el primero. Con frecuencia se enuncia así: A cada acción siempre se opone una reacción igual pero de sentido contrario. En cualquier interacción hay un par de fuerzas de acción y reacción situadas en la misma dirección con igual magnitud y sentidos opuestos. La formulación original de Newton es:
Actioni contrariam semper & æqualem esse reactionem: sive corporum duorum actiones in se mutuo semper esse æquales & in partes contrarias dirigi.[11] Con toda acción ocurre siempre una reacción igual y contraria: quiere decir que las acciones mutuas de dos cuerpos siempre son iguales y dirigidas en sentido opuesto.[13]
Esta tercera ley de Newton es completamente original (pues las dos primeras ya habían sido propuestas de otra manera por Galileo, Hooke y Huygens) y hace de las leyes de la mecánica un conjunto lógico y completo.[19] Expone que por cada fuerza que actúa sobre un cuerpo, este realiza una fuerza de igual intensidad, pero de sentido contrario sobre el cuerpo que la produjo. Dicho de otra forma, las fuerzas, situadas sobre la misma recta, siempre se presentan en pares de igual magnitud y de dirección, pero con sentido opuesto. Si dos objetos interaccionan, la fuerza F12, ejercida por el objeto 1 sobre el objeto 2, es igual en magnitud con misma dirección pero sentidos opuestos a la fuerza F21 ejercida por el objeto 2 sobre el objeto 1:[20]
Este principio presupone que la interacción entre dos partículas se propaga instantáneamente en el espacio (lo cual requeriría velocidad infinita), y en su formulación original no es válido para fuerzas electromagnéticas puesto que estas no se propagan por el espacio de modo instantáneo sino que lo hacen a velocidad finita "c". Este principio relaciona dos fuerzas que no están aplicadas al mismo cuerpo, produciendo en ellos aceleraciones diferentes, según sean sus masas. Por lo demás, cada una de esas fuerzas obedece por separado a la segunda ley. Junto con las anteriores leyes, esta permite enunciar los principios de conservación del momento lineal y del momento angular.[14]
https://es.m.wikipedia.org/wiki/Archivo:Animacionfinal.gif https://es.m.wikipedia.org/wiki/Archivo:Animacionfinal.gif
La fuerza de reacción (flecha verde) aumenta conforme aumenta la aplicada al objeto, la fuerza aplicada (flecha roja)
Aplicaciones de la Tercera Ley de NewtonEditar
Algunos ejemplos donde actúan las fuerzas acción-reacción son los siguientes:[20]
⦁ Si una persona empuja a otra de peso similar, las dos se mueven con la misma velocidad pero en sentido contrario.
⦁ Cuando saltamos, empujamos a la tierra hacia abajo, que no se mueve debido a su gran masa, y esta nos empuja con la misma intensidad hacia arriba.
⦁ Una persona que rema en un bote empuja el agua con el remo en un sentido y el agua responde empujando el bote en sentido opuesto.
⦁ Cuando caminamos empujamos a la tierra hacia atrás con nuestros pies, a lo que la tierra responde empujándonos a nosotros hacia delante, haciendo que avancemos.
⦁ Cuando se dispara una bala, la explosión de la pólvora ejerce una fuerza sobre la pistola (que es el retroceso que sufren las armas de fuego al ser disparadas), la cual reacciona ejerciendo una fuerza de igual intensidad pero en sentido contrario sobre la bala.
⦁ La fuerza de reacción que una superficie ejerce sobre un objeto apoyado en ella, llamada fuerza normal con dirección perpendicular a la superficie.
https://es.m.wikipedia.org/wiki/Archivo:Tierra-luna.jpg https://es.m.wikipedia.org/wiki/Archivo:Tierra-luna.jpg
⦁ Las fuerzas a distancia no son una excepción, como la fuerza que la Tierra ejerce sobre la Luna y viceversa, su correspondiente pareja de acción y reacción:⦁ [21]
La fuerza que ejerce la Tierra sobre la Luna es exactamente igual (y de signo contrario) a la que ejerce la Luna sobre la Tierra y su valor viene determinado por la ley de gravitación universal enunciada por Newton, que establece que la fuerza que ejerce un objeto sobre otro es directamente proporcional al producto de sus masas, e inversamente proporcional al cuadrado de la distancia que los separa. La fuerza que la Tierra ejerce sobre la Luna es la responsable de que esta no se salga de su órbita circular.
Además, la fuerza que la Luna ejerce sobre la Tierra es también responsable de las mareas, pues conforme la Luna gira alrededor de la Tierra esta ejerce una fuerza de atracción sobre la superficie terrestre, la cual eleva los mares y océanos, elevando varios metros el nivel del agua en algunos lugares; por este motivo esta fuerza también se llama fuerza de marea. La fuerza de marea de la luna se compone con la fuerza de marea del sol proporcionando el fenómeno completo de las mareas.
.
{kind=link}
No hay comentarios.:
Publicar un comentario